Hi, which is the best feature extraction & matching algo in case of re-construction of cell tower point clouds using drone images.
Sift is the most accurate as far as I know but to keep more points you should lower the PC-Filter value.
dsp-sift should perform better than SIFT.
Missed that one! What’s dsp-sift about?
Mostly just about way more robust matching and reconstruction:
If you have plenty of images, throw the bg-removal flag as well as using dsp-sift.
what other parameter settings should be used for better Point Cloud creation of cell towers.
Hi Guys,
I have tried using dspsift as per suggestion but getting an error after depth map estimation.
Here is the setting I have used: --auto-boundary --mesh-octree-depth 12 --mesh-size 300000 --pc-quality ultra --use-3dmesh --feature-quality ultra --pc-rectify --max-concurrency 16 --use-exif --feature-type dspsift --texturing-keep-unseen-faces
Is there any conflicting setting with respect to feature type dspsift which might have lead to this error?
Here is the snapshot of error:
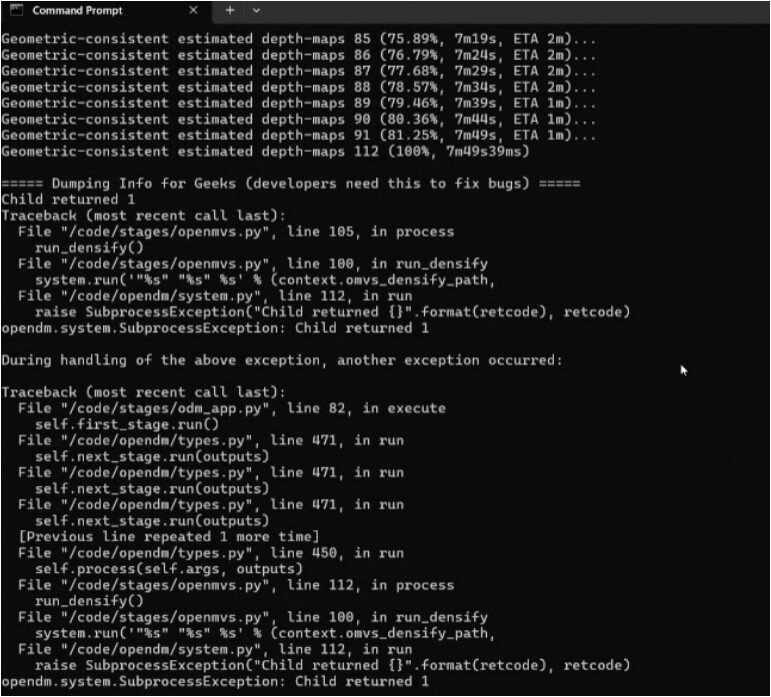
You’re running out of memory. Can you add more RAM and/or swap?
Try all defaults except dspsift and background removal.
Hi Guys,
I have tried running with feature-type dspsift. There is not much improvement in the point cloud quality.
One strange observation I have is that it automatically does the masking (masks available in opensfm folder) even if I have kept the bg-removal false but on another set of images for different cell tower it didn’t do the masking.
Is it like with dspsift it is dynamically decided that masking must be done or not?
If yes, then what is the exact logic behind it or how can we control that?
Regards,
Mitesh Garg
The masks might stay behind if you’ve already generated them in a particular Task.
Try with a new import/Task.