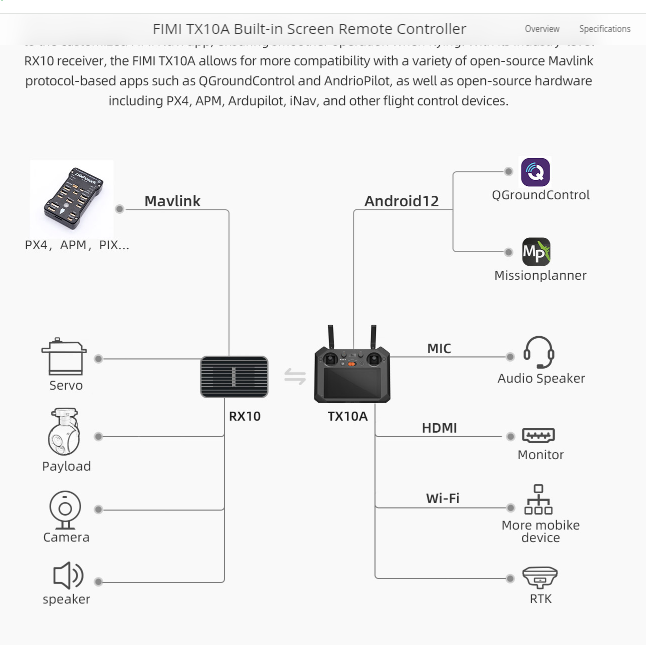
No,Fimi is a medium-sized company without professional drones with quite good R&D but with terrible after-sales service and they have not taken the step to release the SDK or open their equipment to free software and hardware, only a rc controller can be compatible with drone pilot. I am an administrator of a Facebook group. Fimi X8 Aerial mapping group,There are many posts in this forum about jobs with ODM . It is observed how drone pilots from developing countries use it with different tricks to achieve similar objectives to DJI drones, it is a shame that Fimi does not know how to take advantage of the human capital of its users with a policy of approaching the world of software and free hardware. Actually the models fx8 2022 v2 , pro and tele have the bay but only for attach a megaphone and drop things, At this point you can contact them to see if they can collaborate to provide information about the bay and find out if they are interested in developing other modules with free hardware cameras and sensors. Be careful with the specifications they offer because some are advertised but not currently available.
A note for folks interested in this:
Airport is documented and requires two ELRS transmitter module/receiver sets (overview diagram in the ELRS documentation).
A new feature (codename: mavlink-rc) is currently under development that enables the transmission of both the ELRS control signal and MavLink telemetry using a single ELRS transmitter module and receiver (overview diagram in the ArduPilot forum).
Given the rapid pace of ELRS development, I think it may be worth keeping an eye on that new feature.
Awesome! We’ll keep an eye on that.
Any updates?
Yes indeed! Apparently due diligence took a while, so there has been remarkably little official progress. My understanding is we kick off this month, so updates forthcoming.
That said, we split a pilot on scoping the camera with HOT and have some results to share shortly.
For what is worth, on the ExpressLRS (ELRS) side:
The mavkink-rc feature was released as part of v3.5.0 two weeks ago, and is already receiving attention and updates (![]() ) (docs, support on Discord - invite)
) (docs, support on Discord - invite)
RadioMaster timely released a new module called Nomad (and receiver called DBR4) with really interesting characteristics for using MAVLink with ExpressLRS:
- supports Gemini (incl. cross-band 2.4GHz and ~900MHz) for extra reliability
- supports some new modulation modes in ELRS that are particularly fit for the MAVLink-RC feature
I think this new module is a great example of the characteristics of what the ELRS ecosystem can achieve (particularly because RadioMaster has a great track record of making reliable hardware). And IMHO the product docs do provide a pretty good overview of what is available today and at which price point.
This is great. Thanks @gonzalo-bulnes. Definitely a lot more work going on in this space than I was aware of.
Like alluded to above, we did fund a little bit of scoping work, in conjunction with Humantarian OpenStreetMap Team, to get this project kicked off before due diligence was complete on the core project. Geocene worked on the camera hardware scoping, trying to de-risk the next more concrete design phase by reviewing existing sensors, running scenarios on blurring etc. with those potential sensors, developing scenarios for onboard processing and storage of data, all with an eye to that very light packaging.
From the report linked above:
But there is also the added effects of vibration on the camera’s optics, especially the auto-focus
mechanism. The Arducam OwlSight module with phase-detection autofocus we
recommend is reported by customers to be more resilient to vibration than its
electromechanical autofocus Hawkeye brethren.
I remembered that no autofocus at all was an option. Has the thinking changed, or do the recommended hardware not offer any option to lock the focus?
I’m no camera expert, but given the tight blur budget (see report) and the known sensitivity of autofocus mechanisms to vibrations, I must say it made a lot of sense to me when I saw that using a fixed focus was considered.
Both Ivan and I have been pretty consistent in saying we don’t want focus or zoom, and stated this on the followup call when we reviewed the report. But, seeing as it shows up in the report, it bears some attention, given we won’t have the buying power to do our own lens development, so thanks for catching and highlighting that.
I noticed this in the conclusion, I had missed it the first couple of times around ![]()
We recommend building the drone
using the Arducam B0483 “OwlSight” (or equivalent in fixed lens) module based
around the OV64A4 […] (emphasis mine)
Haha! Yeah: there’s a lot in that report, inclusive of many of the intermediate discoveries.
I’ve really been enjoying MLRS recently, I’ve found it to have a more stable connection than ELRS at the cost of being a less supported platform.
I enjoy ELRS for its community support and diverse hardware selection.
I found MLRS harder to get setup, but more performant with higher signal quality in varied terrains. Just my 2-cents.
After thoroughly reading this thread I have a couple of additional thoughts.
- Remote sensing requires specialized tools - no single camera suits all needs.
For a humanitarian surveying camera, I’d recommend focusing solely on surveying capabilities. Adding radiometric functionality would increase costs and complexity without clear humanitarian benefits. Don’t get me wrong, a specialized mapping and spectral sensitivity calibrated camera with paired irradiance downwelling sensor and interchangeable bandpass filters sounds selfishly amazing for my research. But I’m not someone with humanitarian need, I’m a big organization grant-funded conservationist.
I argue this project should whole-heartedly specialize this camera to be the highest quality and lowest cost surveying camera possible with the resources available. If people want to focus on irradiance measurements there are plenty of other commercial platforms competing in the market. Mapir has some starting at $400.
- Drone operations are consistently more challenging to new users than many of us anticipate. The key to adoption isn’t training - it’s simplicity, and in my opinion the ground control interface is crucial.
When complex setups are required (RC transmitter + custom ground station + laptop/etc), it creates barriers for many users. Many of us find it relaxing or enjoyable tweaking flight parameters, flashing firmware, testing for electrical shorts, and etc. In my experience people in humanitarian fields or situations DO NOT, they are worrying about so many other things.
Instead of joining the existing market of customizable DIY drones where setup is often complex/requires RC knowledge, consider focusing on quick integration and ease-of-use. Perhaps a custom controller body with a pre-configured tablet running QGroundControl mounted in the center, similar to DJI’s proprietary approach with their modern controllers. This would reduce flexibility of the platform at the benefit of allowing for faster deployment in the field with a lower cognitive load for the user. I argue that’s more important for the userbase you’d likely be courting.
To be clear, I think this is an amazing project.
We are preparing this summer’s DroneCamp California workshops and the organizing team (many university and educator types) has a fresh interest in low-cost, non-DJI mapping equipment. All of the options known by the various members of the team are at a price point at or above $5,000 per unit. Just wanted to drop this in as a note to say that there is a market for these, with budgets, at least in the training & education. If these were available today I am confident that DroneCamp and several departments within the UC system would be interested in purchases.
Please let us know when this will be happening, and hopefully some of our team can attend.
You bet! It’s scheduled for June 23-27, on the CSU Monterey Bay campus (near Monterey Californa). It would be great to have you. I will DM my email address for further coordination. Here’s some info about the event. (This will be the 9th year.) ABOUT – Drone Camp
Hello everyone. I was actively discussing when I was working on a similar project. The main question was whether it was possible to take photos with an accurate (PPK) ±5cm positioning at the full weight of the aircraft less than 250 grams and having a flight time of about one hour. In order to achieve this, we had to give up vertical takeoff and landing and make a flying wing powered by two Li-Ion 18650 batteries. The weight without the batteries was 163 grams with a wing area of 8 square decimeters. The batteries were two 18650 at 91.5 grams each plus an adapter weighing 4.6 grams, adding up to a total of 249 grams. There is also a search beacon (beeper) and a lidar up to 10 meters for precise autonomous landing. We had to develop a flight controller specifically for Ardupilot as well. The control and two-way telemetry were provided by ELRS. The GNSS L1 module provides NMEA data for navigation as well as conversion into RINEX at a frequency of 5 Hz. Test shots show stable fixed solution ±3cm positioning. The synchronization time of the photo capture is about 0.5 ms. Photos and recording of GNSS data are done using Raspberry Pi 2W. The camera IMX519, 16mp without an IR filter allows for the use of external IR filters for normal shooting and red for NDVI maps of vegetation. The expected performance at a gsd (ground sampling distance) of 3.5 cm is about 2 square kilometers. All software is planned to be eventually formalized and published. More information can be found by searching for PPK/RTK weighing less than 250 grams. If you are interested and have any questions, feel free to ask.
That’s very cool @dmytro7195! How much does it cost (or how much is the cost of the bill of materials)? Is it for sale? Or just at the design/research phase for now?
On a related note, are there any updates on the drone from the original thread?
This is very interesting. I have had a hunch a fixed wing could be a pathway forward due to efficiency, but it requires all the complex elements you describe, including sensored landing. So cool!
The mapping drone space is so limited and increasingly expensive. Finding good, cost effective mapping drones, but especially sub 250g is a bit of a market choke point to any serious mapping work, and certainly a strong barrier to entry for new mappers.
Like Piero, definitely interested in any build links links / BOM / sales info.
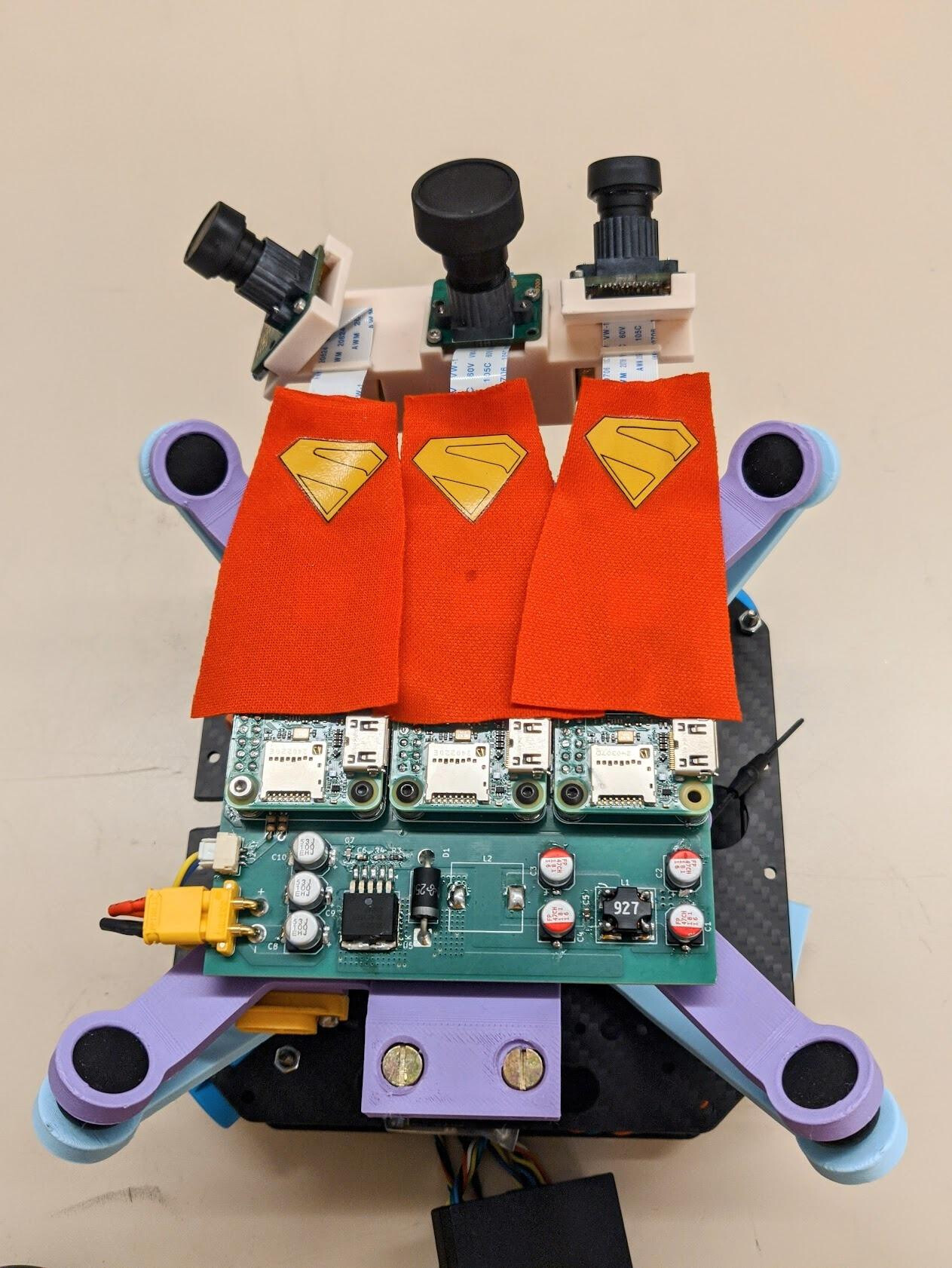
As far as the formal, funded project: it is getting wrapped up in the next few weeks, with a fully functional collection of prototypes not (yet) targeting the 250g limit but will be able to take 3 simultaneous shots. I believe the plan is for HOT to deploy these in Kenya. The camera array with some amusing decoration can be seen below:
I expect we’ll get some nice updates from Ivan as he closes the project out and deploys to the field. And he’s working on next round of funding etc., so the prototypes should just be the start.
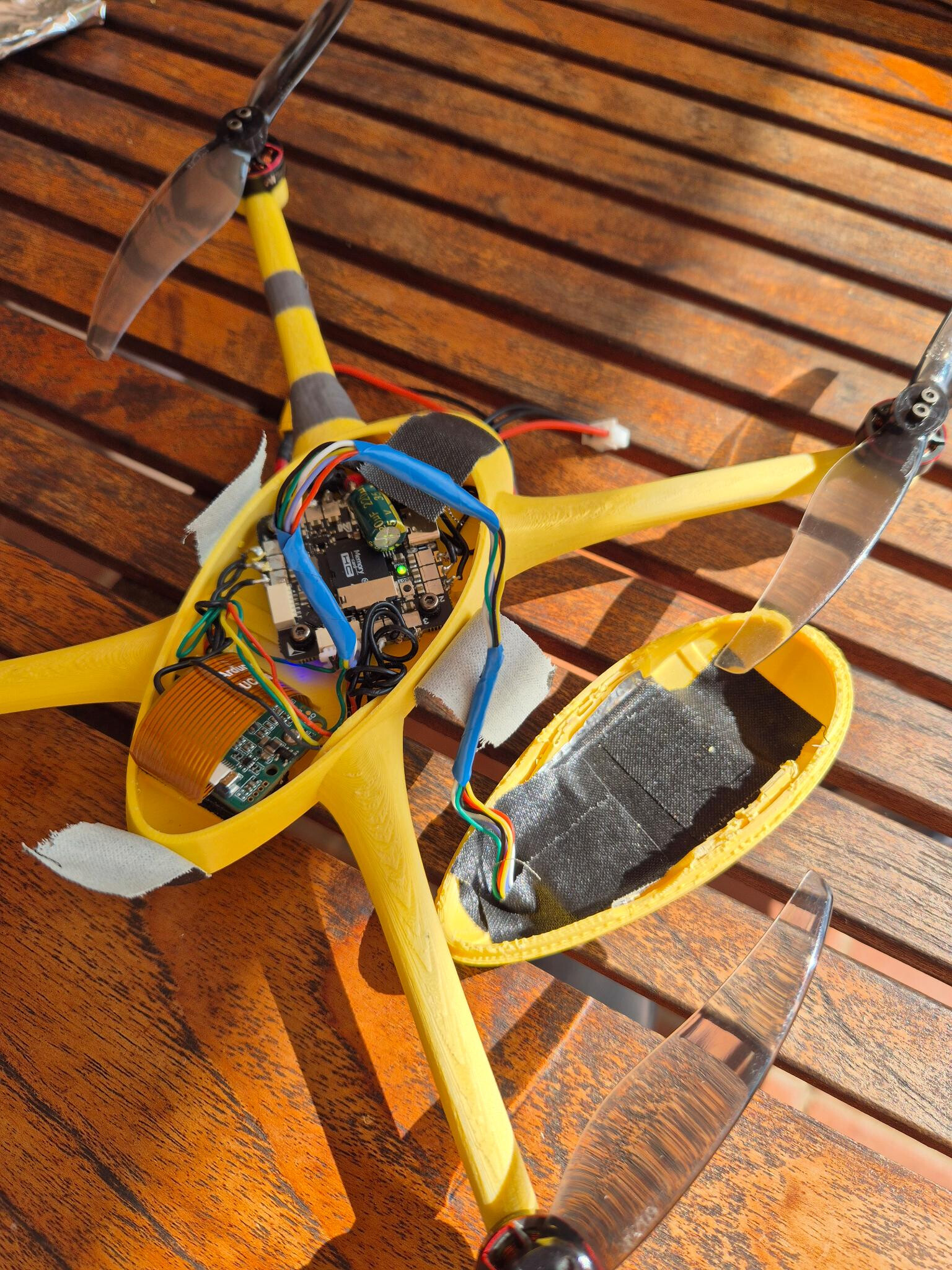
There are 2 additional inter-related projects now underway enthusiastically led by Oriol Lopez. The fixed wing project that I posted about in July pivoted hard when we proposed this workshop at FOSS4G 2025: Mapping with Mini UAVs – UAV build session Workshop, a revisit of the 2015 workshop at FOSS4G Seoul. Oriol has been hard at work at a single camera sub-250g quad for mapping, that is coming together quite nicely:
More on this closer to the date. I won’t be able to join due to an illness in my family, but I’m hoping it will still come together in time for Aukland, and regardless will be released into the wild soon.
Awesome pictures, thanks for the update!