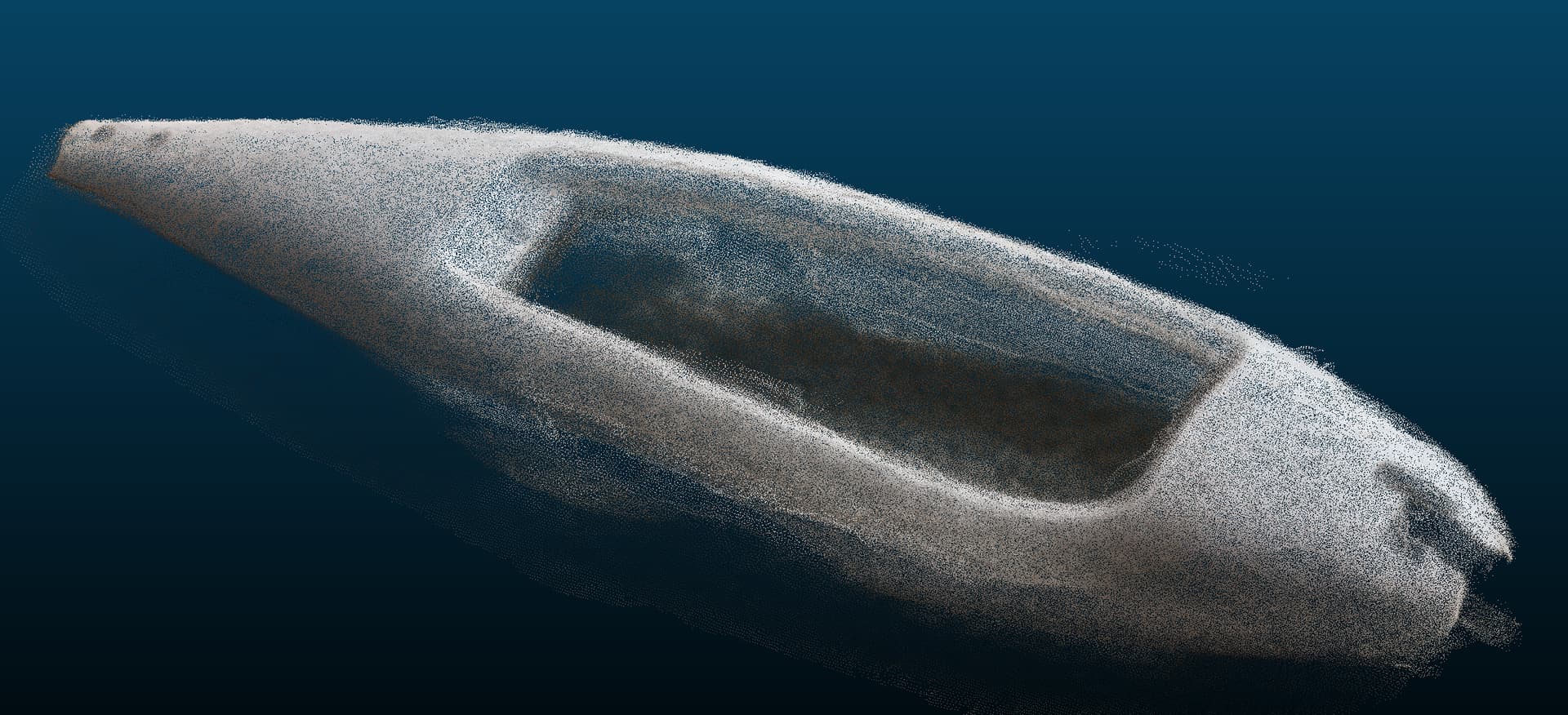
Took a bunch of photos of a cool partial drone body as a potential scan for a friend working on a drone build across the Atlantic. No plans to use it at the moment, but thought it was a fun drone inception case, so I thought I would post it.
A while ago i made a model of a concrete wall at work with my iPhone and GCP’s.
You only need a camera and WebODM.
2 Likes
So true.
1 Like
Related to the above scan, in May, Dr. Hubert Samboko (@huey) and I went to Switzerland for a couple purposes. In truth, it was Hubert’s trip that I joined. He was visiting some velocimetry experts in Zurich with a side trip to Bavaria, but more on that later.
Anyway, at the tail end of the trip, we connected with Oriol Lopez, who is CTO and cofounder of Rigitech in Lausanne. They build drone delivery drones, so Oriol is quite experienced in drone building. Hubert and I visited for social reasons, but also to fly a fixed wing. And in the end, it was the genesis of a new project! A fixed wing community mapping drone to augment the existing community mapping drone that this post describes:
But, let’s go through a bit of the build in Switzerland first.
When we arrived, we didn’t have any fixed wings to fly. So Oriol dusted off an old Skyhunter and we started to build it out.






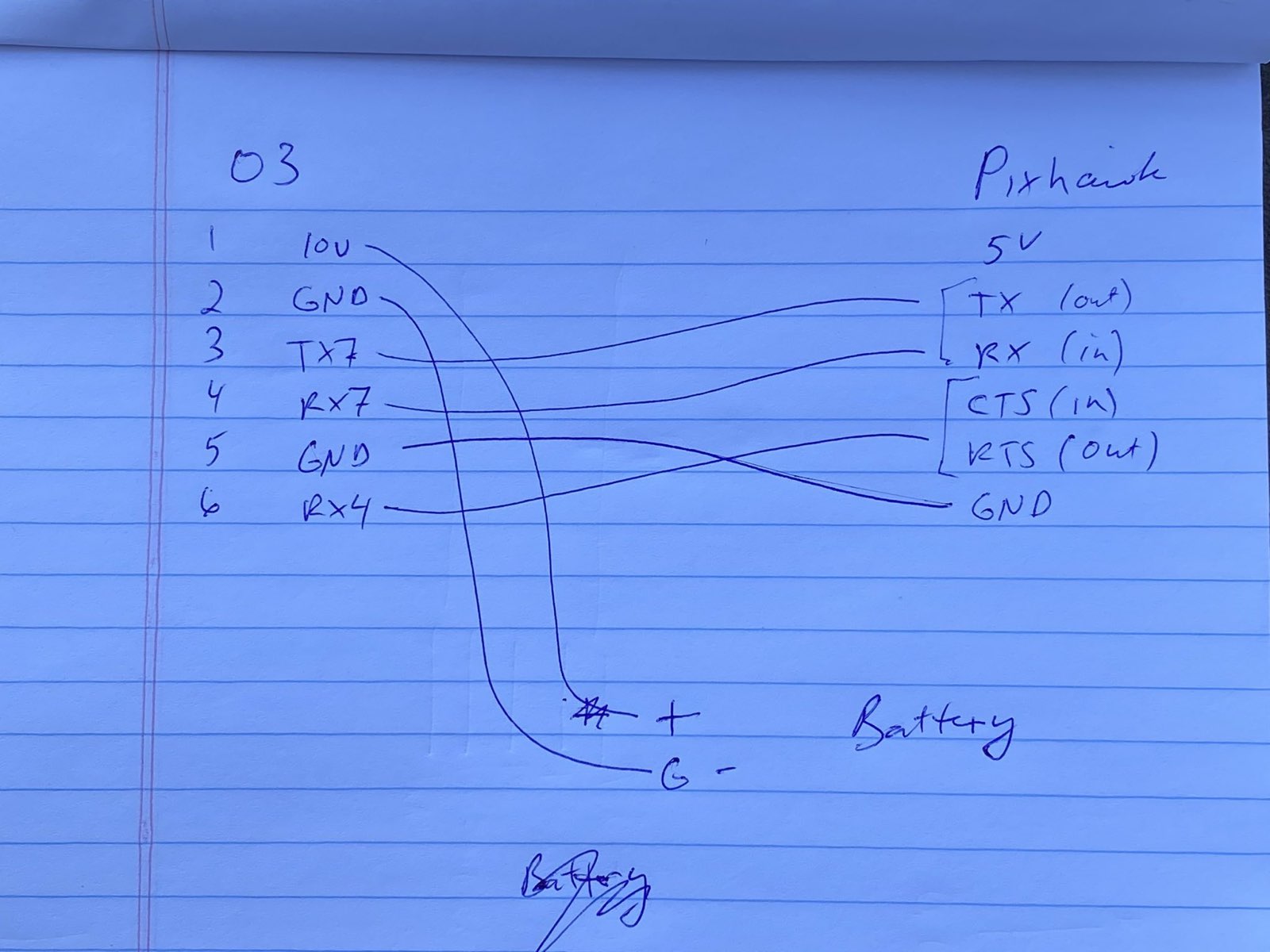
It took a couple days to complete the build. We married together a Pixhawk and a DJI O3. It was an unholy marriage, but gave us nice camera quality.
So we took it off to the field (sadly after Hubert’s departure) and flew it in the Jura mountains with a couple of Oriol’s friends, plus a munchkin in tow:

And we got the renewed bird in the air for a couple delightful flights:

Due to what was probably a power failure combined with lack of GNSS (GPS) compounded by a remote that defaulted to 50% throttle, we managed to crash spectacularly:

But not before gathering some data!

Next, some details as we know them so far on the fixed wing version of the community mapping drone.
6 Likes
So, quick high level goals on this project, similar to the quad project: multi-camera array, low weight (sub-250g), easy to use.
More soon! I’m on vacation / holiday this week, but wanted to discuss a bit the goals.
3 Likes
Some parts arrived today. I didn’t realize quite how small the Raspberry Pi compute module is:
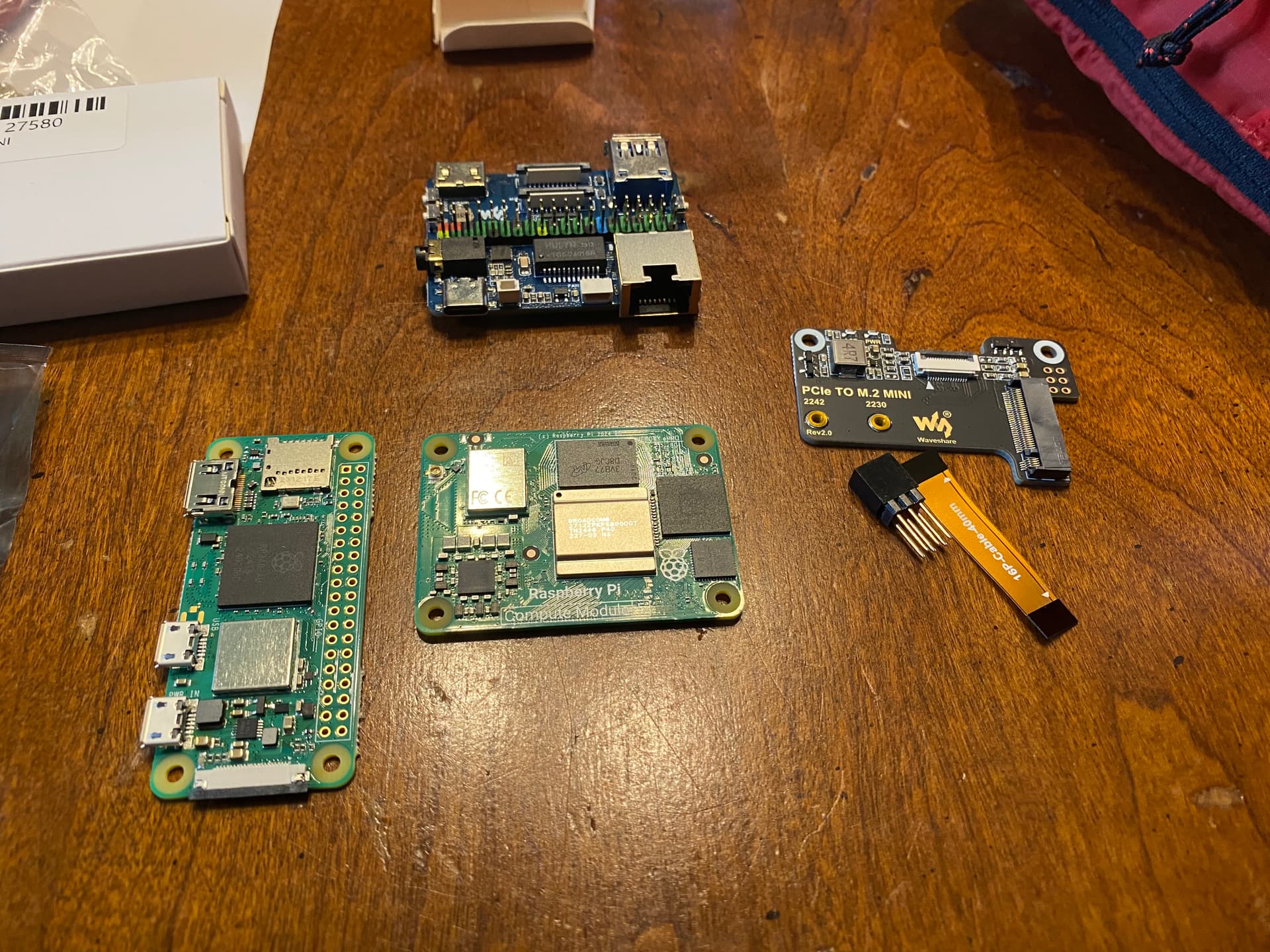
Here it is next to the pi0 on the left.
1 Like
So what will the airframe look like? We don’t know yet, but we are testing a few things. We could focus on wire cut frames like a scaled up clone of this frame:

or 3d printed frames like the Gremlin 640mm FPV plank:

3 Likes
Oriol has sent us new pictures from his secret laboratory in Switzerland!


Ok. Maybe that’s his dining room table. It’s hard to say. But the little fixed wing should be flying soon, assuming the compass is willing to cooperate.
6 Likes
This looks amazing, and I would like to subscribe to your newsletter. My own drone mapping efforts are all DJI and thus pretty much the opposite of future-proof, and I’ve got the space to run one of these, especially if it can be programmed to follow flight paths and take pictures etc. Is this effort being documented elsewhere?