Community Software Development, Core
Brett Carlock (@Saijin_Naib) is fond of joking something to the effect that OpenDroneMap is n+1 software libraries in a trenchcoat. Such a complex and effective stack as OpenDroneMap is, in fact, dependent on lots of smaller software libraries. As such, we are a beneficiary of a stack of clever software necessary to perform all the complex tasks that OpenDroneMap does. But this also means that updating, upgrading, and maintaining the project is a special challenge. That’s true for the photogrammetry engine, ODM, as well as WebODM and everything in between.
Partial list of some of ODM’s underlying libraries
- OpenSfM
- OpenMVS
- PDAL
- Entwine
- GDAL
- MVS-Texturing
- PoissonRecon
- etc. …
Full stack upgrade
With all those libraries and the challenge of keeping / bringing them up-to-date, in Mid-2025, @NathanMOlson was kind enough to dive in and update and upgrade the stack in order to support building our docker image on Ubuntu 24.04. I did my best to support that upgrade with extensive testing through the end of October. We’re waiting on final release and deployment now that Leonardo has joined as OpenSfM / ODM core maintainer (more on that below), but the work Nathan did should both help with upgrades and updates moving forward and improve our security / vulnerability posture within the project overall.
You can follow along on that continuing upgrade process in this thread. A rough play-by-play of the upgrade and testing process process can be found within.
OpenSfM, 4 years newer
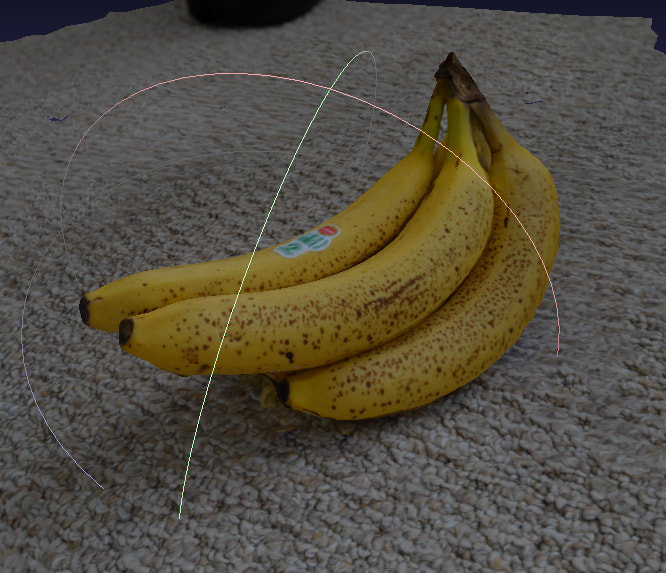
OpenSfM is the core library underpinning OpenDroneMap’s ability to do structure from motion, i.e. turning arbitrary images into 3D structures. Pau Gargallo started OpenSfM just prior to joining the computer vision Mapillary, which later was acquired by Facebook/Meta. OpenSfM became a core project in the early Mapillary experiment, and also has underpinned OpenDroneMap since early on, with both project co-arising in the late 20-teens.
Yann Noutary, core OpenSfM developer, in his down-time between working for titans of mapping and metaverse showed up to breath some extra life into the project and ensure that OpenDroneMap could be a beneficiary and benefactor of the OpenSfM moving forward. His fixes and enhancements included the following:
This was a monumental lift and points us in a good direction for upgrade and forward movement on the core photogrammetry tools.
On a call with @DodgySpaniard and me, he expressed his motivation in doing so: with the slow-down of OpenSfM development over the last 5 years, he had lots of pent up energy to do all the interesting projects, and was relieved that OpenDroneMap is still here making an impact using OpenSfM. While he had downtime, he wanted to contribute those ideas back.
This also helps queue OpenDroneMap up as the maintainer of OpenSfM moving forward. You can follow along with some of that conversation in the thread on @DodgySpaniard coming on as OpenSfM Maintainer.
OpenSfM and ODM Maintenance
Being the beneficiary of upstream work sometimes requires becoming the benefactor. Piero Toffanin set down the ODM maintenance mantle in August 2025 to focus on WebODM maintenance and improvements. With no known active OpenSfM maintainer, Yann helped us recruit Leonardo Urena-Fuentes (aka @DodgySpaniard) to serve as both OpenSfM and ODM maintainer. He is currently taking on the orientation and high-impact, lower effort tasks such as fixing broken builds, and will ramp up to setting up a roadmap and fixes for both starting second quarter of 2026.
It’s good to weigh in on project pain points, and Leonardo has request input on this on the following thread.