When I process my multispectral from DJI M3M drone TIFFs with multispectral setting I can export the NDVI vegetation File as GeoTIFF(raw). But there are bands from -5.6 till +1.4? In my understanding of NVDI it should be -1 till +1.
I´ve also made a raster calculation inside QGIS with the multispectral GeoTIFF(raw) file and its separate bands: (N-R)/(N+R) → result in -648,1 till +5,6. (If band 3 is the NIR in WebODM GeoTiff). Sadly I can´t click on the NDVI points inside WebODM to check the index.
I did an additional raster calculation in QGIS with original DJI files and get values between -0,71 till +0,67. It seems there is a bug in GeoTIFF(raw) multispectral outputs?
The original M3M Tiffs are also 16bit (each band), the exported ones are 32bit.
Band 1: Red
Band 2: Green
Band 3: NIR
Band 4: Red Edge
Band 5: Alpha (opacity)
I did a new processing task now: tried out some configs and changed the radiometric-calibration from camera to none. Now I will get a 16bit GeoTiff(raw) file. When I did my calculations in QGIS I will get values between -1 and +1.
NVDI = (Band3-Band1) / (Band3+Band1)
(while Band1=red, Band3=NIR)
What does radiometric-calibration mean? Thought “camera” or “camera+sun” will be the best? “camera+sun” because of lightsensor on Mavic3M?
Or must I change something in QGIS to get the same values?
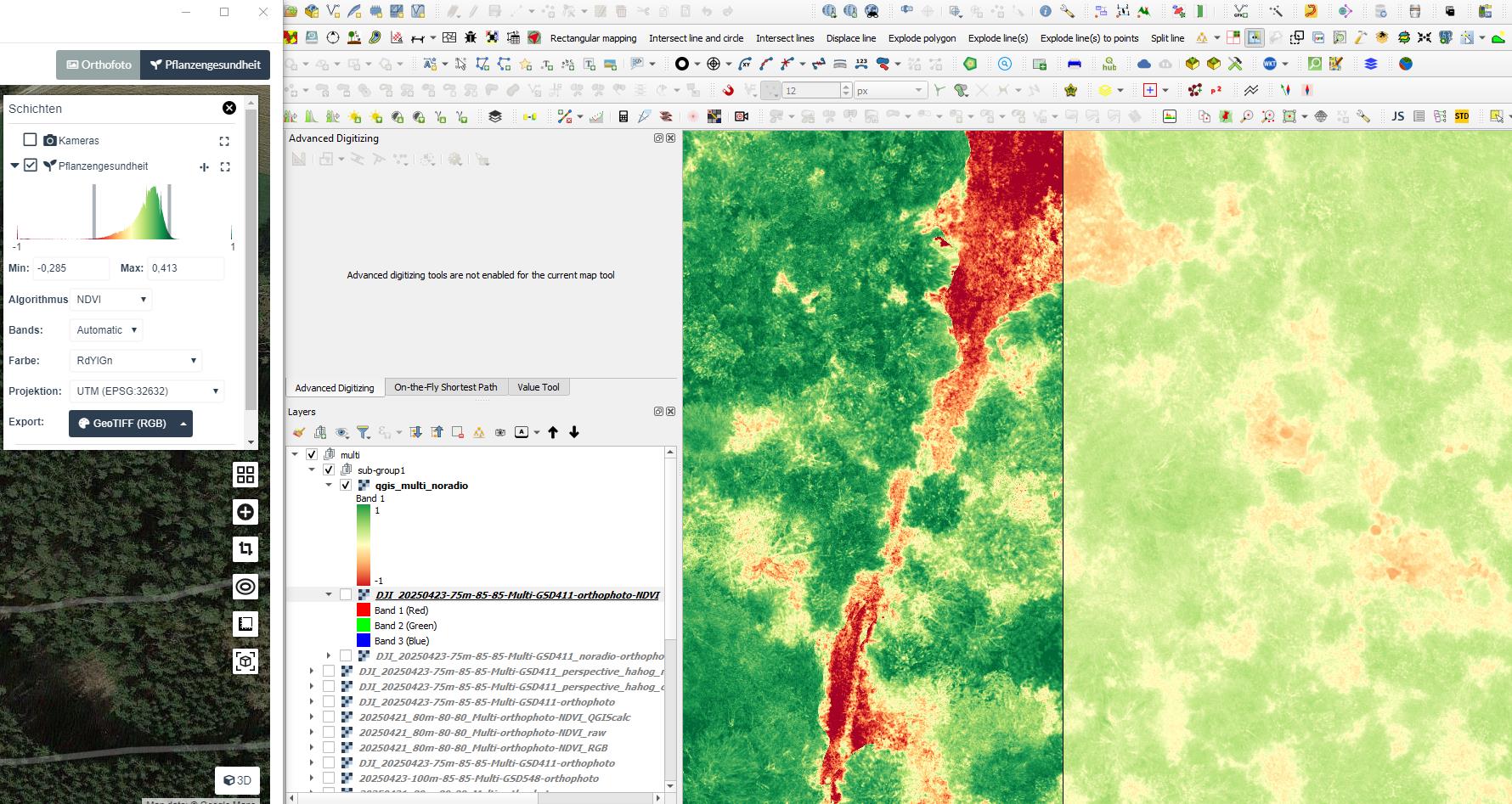
Picture left NDVI from WebODM and right my calculations. The contrast fails, but in WebODM it is limited to -0,285 till +0,413. So this is a truncated value mapping.
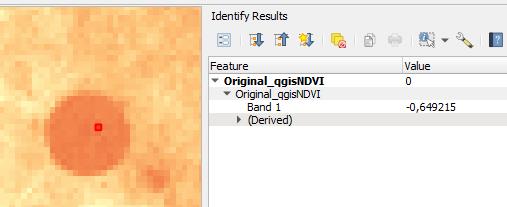
Now I´ve checked the values between original TIFF out of cam calculated in QGIS and on the other side the WebODM multispectral image GeoTIFF with radiometric-calibration:none (also in QGIS):
Same point on picture:
WebODM value:
-0.51 till -0.61
Original value:
-0.61 till -0.67
With the DJI Mavic 3 Multispectral you need to use camera+sun. This will utilize the values from the Mavic’s downwelling light sensor to compute “pseudo reflectance values”.
Keep in mind that the MS cameras of the Mavic are only relatively calibrated, not absolutely! This means the bands of the 4 cameras are calibrated relative to each other, but you cannot get relfectance values without a calibration panel! For self-calibrating indices like NDVI this does not matter and relative calibrated indices are sufficient.
One more thing: If it is sunny and you want to be really precise you need to consider the the direction of the route and the direction the drone is facing. Depending on the flight direction, the drone tilts and the DWL-sensor can sometimes face towards the sun and on the way back away from the sun! The M3M allows to use a fixed yaw angle of the drone and to change the direction of the route but this will then mess up your image overlap settings, which cannot be adapted when the yaw of the drone is fixed. Our preliminary tests show that it is probably best to have your flight route parallel to the sun and do not use a fixed yaw angle.