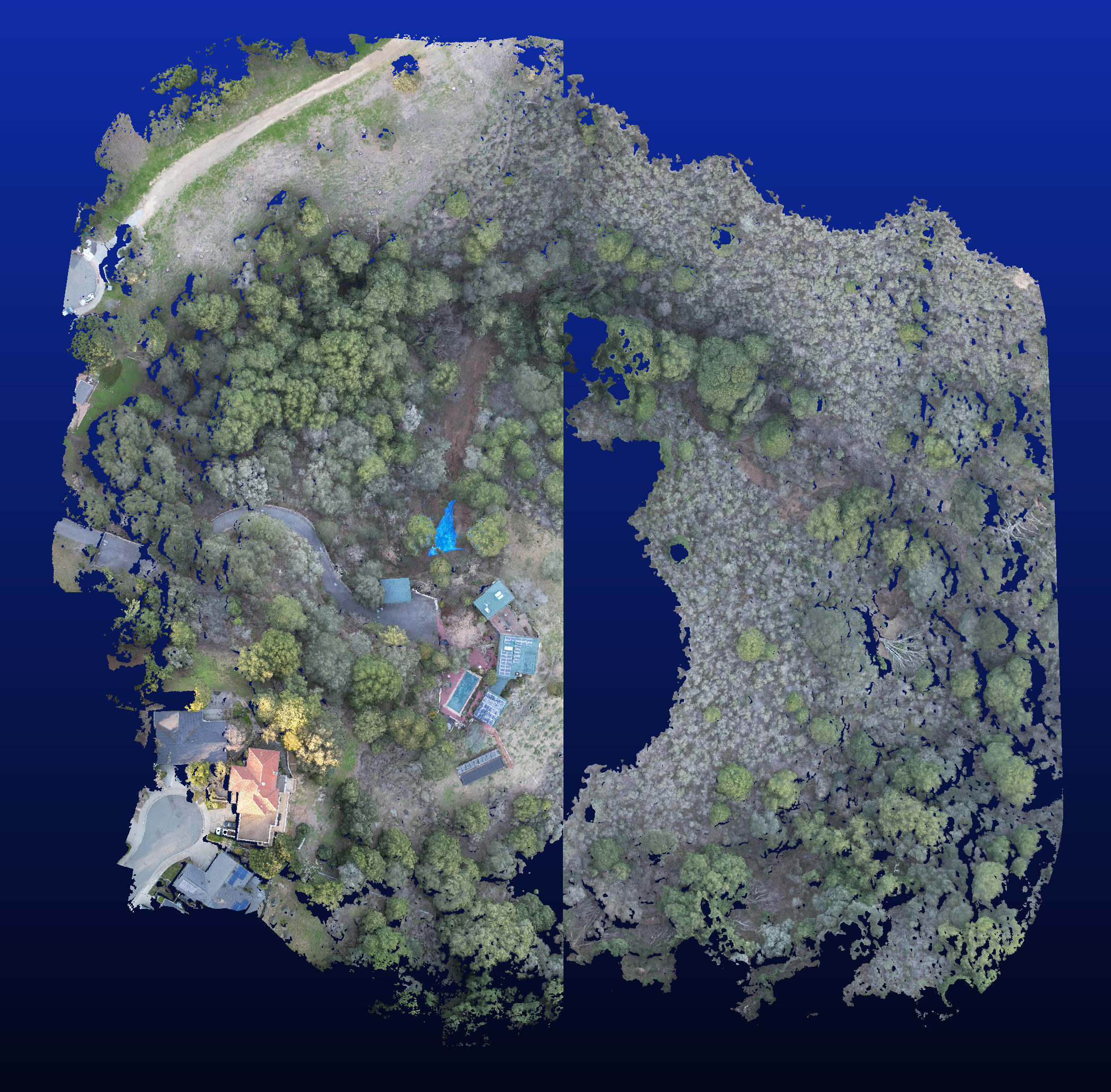
I have now had three stitchings fail at “ultra” quality (while other runs with ultra with different photos have succeeded). The symptoms are that I have “holes” in my point cloud and exactly corresponding flat areas in my dsm & dtm. If I had to guess, I would say the WebODM exceeded some limit on resources available, and stopped processing for a while, but didn’t crash.
This is clearly not due to a lack of features, as the point cloud and dsm does not have holes when processed at “high” quality. Any suggestions?
This is the latest example. 347 images each 5472 pixels wide, high overlap (90% I think), processed with Docker having 64 GB of memory and 11 processors. (MacOS Intel).
Here is a link to a screenshot from CloudCompare of the .laz file:
Here is a link to a screenshot from QGIS of the dsm.tif file:

Here is a link to the entire output from the run:
And these are the parameters of the run:
[INFO] DTM is turned on, automatically turning on point cloud classification
[INFO] Initializing ODM 3.0.4 - Sun Feb 05 07:21:44 2023
[INFO] ==============
[INFO] 3d_tiles: False
[INFO] align: None
[INFO] auto_boundary: True
[INFO] auto_boundary_distance: 0
[INFO] bg_removal: False
[INFO] boundary: {}
[INFO] build_overviews: False
[INFO] camera_lens: auto
[INFO] cameras: {‘dji fc3411 5472 3648 brown 0.6111’: {‘projection_type’: ‘brown’, ‘width’: 5472, ‘height’: 3648, ‘focal_x’: 0.6283419967936914, ‘focal_y’: 0.6283419967936914, ‘c_x’: 0.007569731737564364, ‘c_y’: 0.002472184071427966, ‘k1’: -0.06882044698571836, ‘k2’: 0.04194169673011737, ‘p1’: 0.00040774105953342163, ‘p2’: 0.00037267705432290807, ‘k3’: 0.018507473910662615}}
[INFO] cog: True
[INFO] copy_to: None
[INFO] crop: 3
[INFO] dem_decimation: 1
[INFO] dem_euclidean_map: False
[INFO] dem_gapfill_steps: 3
[INFO] dem_resolution: 2.0
[INFO] dsm: True
[INFO] dtm: True
[INFO] end_with: odm_postprocess
[INFO] fast_orthophoto: False
[INFO] feature_quality: high
[INFO] feature_type: sift
[INFO] force_gps: False
[INFO] gcp: None
[INFO] geo: None
[INFO] gltf: True
[INFO] gps_accuracy: 10
[INFO] ignore_gsd: False
[INFO] matcher_neighbors: 0
[INFO] matcher_type: flann
[INFO] max_concurrency: 11
[INFO] merge: all
[INFO] mesh_octree_depth: 11
[INFO] mesh_size: 200000
[INFO] min_num_features: 10000
[INFO] name: 1f6a9151-7bbf-472d-ba8c-d1bbd23546d1
[INFO] no_gpu: False
[INFO] optimize_disk_space: False
[INFO] orthophoto_compression: DEFLATE
[INFO] orthophoto_cutline: False
[INFO] orthophoto_kmz: False
[INFO] orthophoto_no_tiled: False
[INFO] orthophoto_png: False
[INFO] orthophoto_resolution: 1.0
[INFO] pc_classify: True
[INFO] pc_copc: False
[INFO] pc_csv: False
[INFO] pc_ept: True
[INFO] pc_filter: 2.5
[INFO] pc_las: False
[INFO] pc_quality: ultra
[INFO] pc_rectify: False
[INFO] pc_sample: 0
[INFO] pc_skip_geometric: False
[INFO] pc_tile: False
[INFO] primary_band: auto
[INFO] project_path: /var/www/data
[INFO] radiometric_calibration: none
[INFO] rerun: None
[INFO] rerun_all: False
[INFO] rerun_from: None
[INFO] rolling_shutter: False
[INFO] rolling_shutter_readout: 0
[INFO] sfm_algorithm: incremental
[INFO] skip_3dmodel: False
[INFO] skip_band_alignment: False
[INFO] skip_orthophoto: False
[INFO] skip_report: False
[INFO] sky_removal: False
[INFO] sm_cluster: None
[INFO] sm_no_align: False
[INFO] smrf_scalar: 1.25
[INFO] smrf_slope: 0.15
[INFO] smrf_threshold: 0.5
[INFO] smrf_window: 18.0
[INFO] split: 999999
[INFO] split_image_groups: None
[INFO] split_overlap: 150
[INFO] texturing_keep_unseen_faces: False
[INFO] texturing_single_material: False
[INFO] texturing_skip_global_seam_leveling: False
[INFO] texturing_skip_local_seam_leveling: False
[INFO] tiles: False
[INFO] use_3dmesh: False
[INFO] use_exif: False
[INFO] use_fixed_camera_params: False
[INFO] use_hybrid_bundle_adjustment: False
[INFO] video_limit: 500
[INFO] video_resolution: 4000
[INFO] ==============
[INFO] Running dataset stage
[INFO] Loading dataset from: /var/www/data/1f6a9151-7bbf-472d-ba8c-d1bbd23546d1/images
[INFO] Loading 347 images
[INFO] Wrote images database: /var/www/data/1f6a9151-7bbf-472d-ba8c-d1bbd23546d1/images.json
[INFO] Found 347 usable images
[INFO] Finished dataset stage
[INFO] Running split stage
[INFO] Normal dataset, will process all at once.
[INFO] Finished split stage
[INFO] Running merge stage
[INFO] Normal dataset, nothing to merge.
[INFO] Finished merge stage
[INFO] Running opensfm stage
[INFO] Wrote camera_models_overrides.json to OpenSfM directory
[INFO] Maximum photo dimensions: 5472px
[INFO] Photo dimensions for feature extraction: 2736px
[INFO] nvidia-smi not found in PATH, using CPU
[INFO] Altitude data detected, enabling it for GPS alignment
[INFO] [‘use_exif_size: no’, ‘flann_algorithm: KDTREE’, ‘feature_process_size: 2736’, ‘feature_min_frames: 10000’, ‘processes: 11’, ‘matching_gps_neighbors: 0’, ‘matching_gps_distance: 0’, ‘matching_graph_rounds: 50’, ‘optimize_camera_parameters: yes’, ‘reconstruction_algorithm: incremental’, ‘undistorted_image_format: tif’, ‘bundle_outlier_filtering_type: AUTO’, ‘sift_peak_threshold: 0.066’, ‘align_orientation_prior: vertical’, ‘triangulation_type: ROBUST’, ‘retriangulation_ratio: 2’, ‘matcher_type: FLANN’, ‘feature_type: SIFT’, ‘use_altitude_tag: yes’, ‘align_method: auto’, ‘local_bundle_radius: 0’]
[INFO] Wrote reference_lla.json
[INFO] running “/code/SuperBuild/install/bin/opensfm/bin/opensfm” detect_features “/var/www/data/1f6a9151-7bbf-472d-ba8c-d1bbd23546d1/opensfm”


