and my question is it looked way better before I updated the ODM new enginie, it was almost perfect with the default setting, but now with the newly updated engine, I don’t think I can make it any better without help.
The result data in the folder was processed with the following parameters by the way.
within the past 2 days, I’ve tried with different settings of the parameters and I keep getting almost no usable result. It would be appreciated if anyone can guide me.
Wow… this is so cool!! and this is jaw-dropping information for me, and thank you so much for the reply Gordon. and you are so generous to share your tips of years of experience. I will try to figure out the GEOJSON part as well. The idea you pointed out helped real big.
Saijin_Naib, you are like the Genie😀 in this community, and increasing the value of both changed a lot for the result. still need to work on the detail more but looks dramatically great already now.
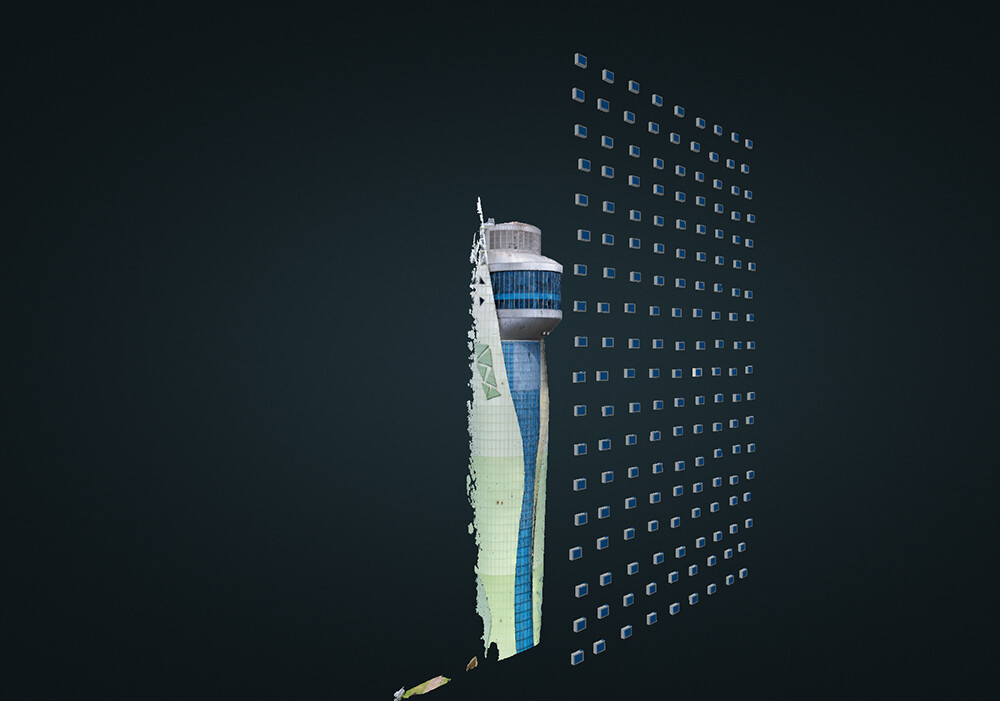
They were 75 / 75 % each and changed to 85 / 85 % and the result looks like this.
That’s a beautiful reconstruction! Very well done!
These are harder to implement but if your subjects are going to be shiny buildings:
An evenly-overcast day is best (no harsh highlights and shadows!) if you can choose when to collect
Investigate if your platform can have a circular polarizer filter fitted on the camera without harming the gimbal. These will (when tuned properly) cut a huge amount of bouncing light in the scene, reducing or eliminating reflections and boosting overall contrast/saturation a bit (do note that they reduce incoming light a bit, so ISO and shutter speed might go up a fractional amount to compensate).